IROS14 WS & IJHR SI on Whole-Body Control for Robots in the Real World
CALL FOR CONTRIBUTIONS to the twin events:
- Full-day Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014)
Organizers: F.L. Moro (IIT), M. Gienger (Honda RI-EU), O. Khatib (Stanford), E. Yoshida (AIST)
Date: Sept 18th, 2014
- Special Issue on the International Journal of Humanoid Robotics (IJHR)
Editors: F.L. Moro (IIT), M. Gienger (Honda RI-EU), A. Goswami (Honda RI-US), O. Khatib (Stanford), E. Yoshida (AIST)
Issue: December 2015
on the theme: “Whole-Body Control for Robots in the Real World”
CONTENT:
With growing research interest in humanoid robotics, robots have become increasingly proficient in performing many different, non-trivial tasks, such as running, jumping, climbing stairs, and manipulating objects. In most cases, however, each of these tasks is addressed individually, and this imposes a fundamental limitation on the use of robots in the real world. While humans may occasionally be outperformed by robots in a single task, they are vastly more capable of adapting and combining behaviors to solve multiple different tasks. This flexibility allows humans to generalize their knowledge, and to successfully perform tasks that they have never explicitly faced before. This also opens the door for simultaneous execution of multiple tasks. To address these constraints, Whole-Body Control Systems have been proposed as a promising research direction. They represent a wide range of complex movement skills in the form of low-dimensional task descriptors which are projected on to the robot’s actuators, thereby exploiting the full capabilities of the entire body.
Until recent years, limitations on hardware relegated Whole-Body Control to almost purely theoretical research. Recently a growing number of experimental platforms have become available (in particular torque-controlled humanoids). This new opportunity has triggered the deployment on real robots of the theoretical outcomes of research in the field. This is backed up by a number of new research projects addressing issues in this domain, including WALK-MAN, CoDyCo, KoroiBot, and the Darpa Robotic Challenge (DRC) which presents a more application-oriented development of these methods.
This full-day workshop and special issue aim to bring together the main actors in the field to:
- disseminate knowledge of the rapidly evolving state-of-the-art in Whole-Body Control, with dual goals of understanding the new theoretical studies and applying this experience to real robots, with particular emphasis on the latter;
- encourage discussion among speakers, and between speakers and attendees to the workshop to understand better what are the current main problems that still need to be solved to attain the target of having robots capable of moving in and interacting with the real world;
- trigger new collaborations among researchers in the field for a faster and more effective development of Whole-Body Control methods to be applied on real robots.
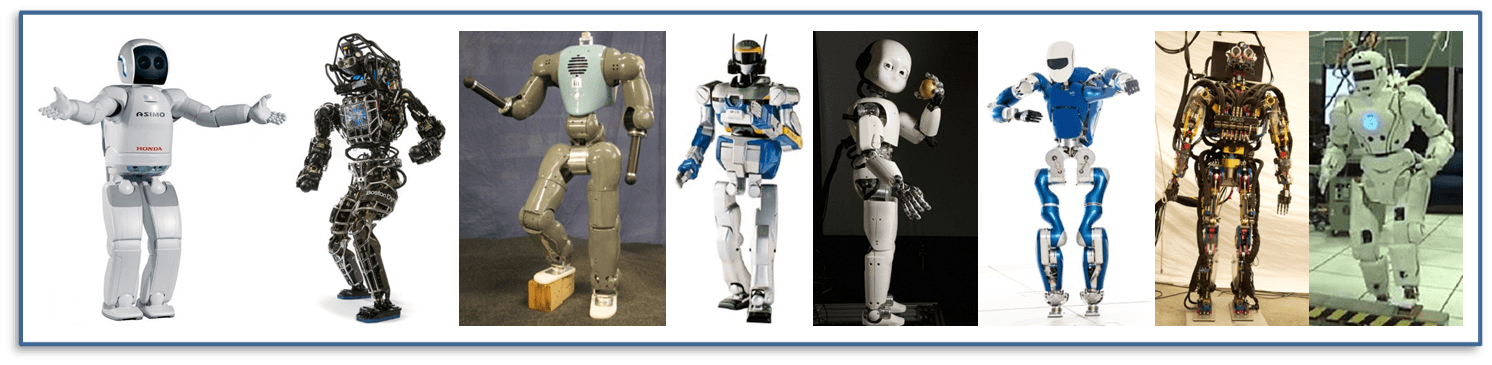
Contributors are invited to discuss their hands-on experience on the Whole-Body Control of real robots. The platforms that are currently being used by the WS invited speakers/organizers in their research consist of 8 different humanoid robots (ASIMO, ATLAS, COMAN, HRP-2, iCub, TORO, Sarcos robot, Valkyrie). This number grows to at least 16 if we also consider robots with which the speakers have had previous research experience. From this list at least 4 will be participants in the DRC, whose finals will take place in 2015.
LIST OF TOPICS:
The focus will be on real experiences in Whole-Body Control with real robots. The WS and SI will cover, but not be limited to, the following topics:
- Whole-body position/force control
- Model-based robot dynamics
- Centroidal momentum
- Contacts planning and control
- Torque-control
- Compliant body behavior
- Practical tips on whole-body control with real robots
- Whole-body agile locomotion and dexterous manipulation
IROS14 WORKSHOP:
Schedule:
[08.45 - 09.00] Introduction 
[09.00 - 09.30] Christian Ott (DLR)
“Practical Experiences with the Torque-Controlled Humanoid Robot TORO”
[09.30 - 10.00] Yoshihiko Nakamura (Univ. of Tokyo)
“On Reuse of Human Motion for Robot Control”
[10.00 - 10.30] Patrick M. Wensing and David E. Orin (OSU)
“Centroidal Dynamics for Whole-Body Humanoid Control”
[10.30 - 11.00] Coffee Break
[11.00 - 11.30] Siyuan Feng (CMU)
"Full-Body Control for the Atlas Robot"
[11.30 - 12.00] Federico L. Moro (IIT)
“An Attractor-based Whole-Body Motion Control (WBMC) System - Tests with the COMAN Robot”
[12.00 - 12.30] Russ Tedrake (MIT)
“Optimization-based estimation, planning, and control”
[12.30 - 13.30] Lunch Break
[13.30 - 14.15] Interactive Session (see below)
[14.15 - 14.45] Andrea Del Prete (LAAS-CNRS)
"Joint-Torque Control with Electric Motors and Harmonic Drives"
[14.45 - 15.15] Silvio Traversaro (IIT)
“Whole-body Dynamic Computations on the iCub Humanoid”
[15.15 - 15.45] Coffee Break
[15.45 - 16.15] Luis Sentis (UT Austin)
“Middleware for Rapid Application Programming”
[16.15 - 16.45] Mitsuharu Morisawa (AIST)
"Locomotion and Manipulation in Unknown Environment by HRP-2"
[16.45 - 17.15] Ludovic Righetti (MPI)
“Experiments with Hierarchical Inverse Dynamics Control on a Torque-Controlled Humanoid”
[17.15 - 18.00] Round Table
Interactive Session:
- Hongkai Dai (MIT), Andres Valenzuela (MIT), Russ Tedrake (MIT)
“Whole-body Motion Planning with Simple Dynamics and Full Kinematics”
- Michele Focchi (IIT), Andrea Del Prete (LAAS-CNRS), Ioannis Havoutis (IIT), Claudio Semini (IIT), Roy Featherstone (IIT), Darwin G. Caldwell (IIT)
“High-slope Terrain Locomotion for Torque-Controlled Quadruped Robots”
- Gerardo Jarquin (IPN), Gustavo Arechavaleta (IPN), Adrien Escande (AIST), Eiichi Yoshida (AIST)
“Time-Constrained Whole Body Control With Smooth Task Transitions”
- Jaeheung Park (SNU)
“Experimental Results of Whole-body Control Framework on Torque Controlled Humanoid Legged Robot and Dual Arm-Hand Manipulator”
- Alessio Rocchi (IIT), Enrico Mingo Hoffman (IIT), Edoardo Farnioli (IIT), Nikos G. Tsagarakis (IIT)
“A Whole-Body Stack-of-Tasks compliant control for the Humanoid Robot COMAN” 
- Jesper Smith (IHMC), Sylvain Bertrand (IHMC), Peter Neuhaus (IHMC), Matthew Johnson (IHMC), Jerry Pratt (IHMC), and the IHMC team
“Momentum-based whole-body control framework – Application to the humanoid robots Atlas and Valkyrie”
- Wael Suleiman (Univ. of Sherbrooke Quebec)
“Inverse Kinematics: New Method for Minimum Jerk Trajectory generation”
- Hilario Tome (PAL), Luca Marchionni (PAL), Adolfo Rodriguez Tsouroukdissian (PAL)
“Whole body control using Robust & Online hierarchical quadratic optimization”
Call for contributions CALL CLOSED
Perspective contributors are invited to submit an extended abstract (1 to 3 pages) describing their related research. All relevant and distinguished works will be selected and organized in the form of interactive session, or invited to give an oral talk presentation.
Submissions must be in PDF format, and have to be sent to
Important dates
Submission deadline: June 15th, 2014 July 15th, 2014
Notification of acceptance: July 15th, 2014 July 31st, 2014
Workshop date: Sept 18th, 2014
IJHR SPECIAL ISSUE:
Call for papers
Perspective contributors are invited to submit a full paper on their related research. All papers will undergo the regular IJHR review process.
IJHR Website: http://www.worldscientific.com/page/ijhr/callforpapers-details#Whole-Body%20Control
Authors should follow the guidelines of the International Journal of Humanoid Robotics (IJHR). The format is described at:
http://www.worldscientific.com/page/ijhr/submission-guidelines
Prospective authors should submit an electronic copy of their completed manuscripts through the on-line submission system at:
http://www.editorialmanager.com/ijhr/default.asp?pg=login.asp with the note "This paper is submitted to the Special Issue on Whole-Body Control for Robots in the Real World" according to the submission schedule.
Important dates
Submission deadline: 27th Mar 2015 24th May 2015
To appear in the issue of Dec 2015
FURTHER NOTES
- A contribution can be either only for the Workshop or for the Special Issue, or (better) for both events.
- Speakers at either oral or interactive session of the WS will be invited to submit a contribution to the IJHR SI.
- There is no limitation on the number of contributions from the same author/institution.
Contact:
Acknowledgment:
The IROS14 WS & IJHR SI on Whole-Body Control for Robots in the Real World are supported by the IEEE-RAS Technical Committee on Whole-Body Control - http://www.wholebodycontrol.eu/