A Torque Controlled Humanoid Robot Riding On A Two Wheeled Mobile Platform
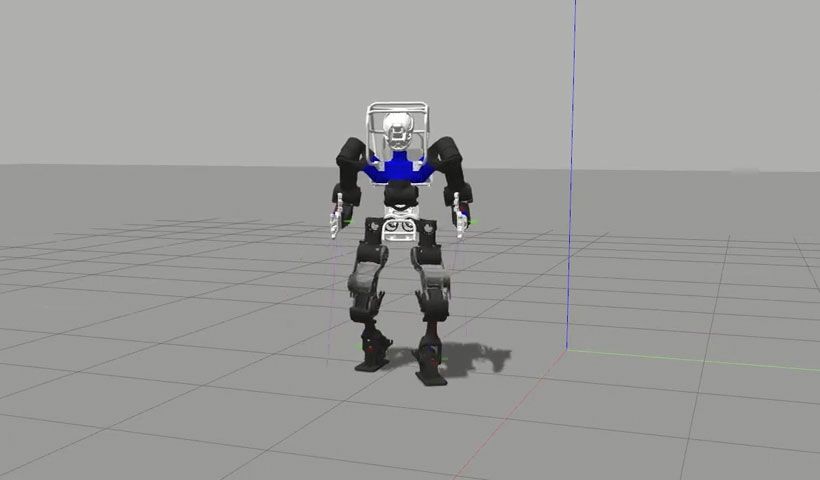
CoMAN
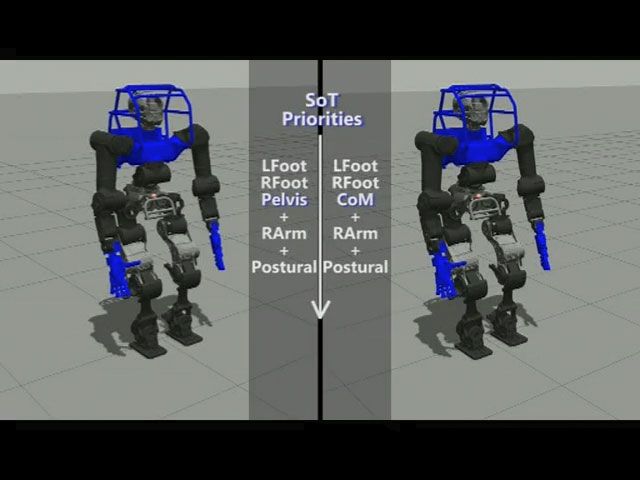
Comparison between a CoM based walking and a Pelvis based walking while moving the arm.
IROS'16
DRC Challenge Team Walkman Timelapse
DRC Preparation WALKMAN Garage Timelapse
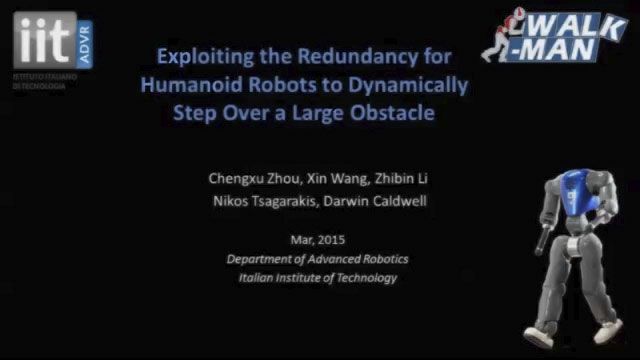
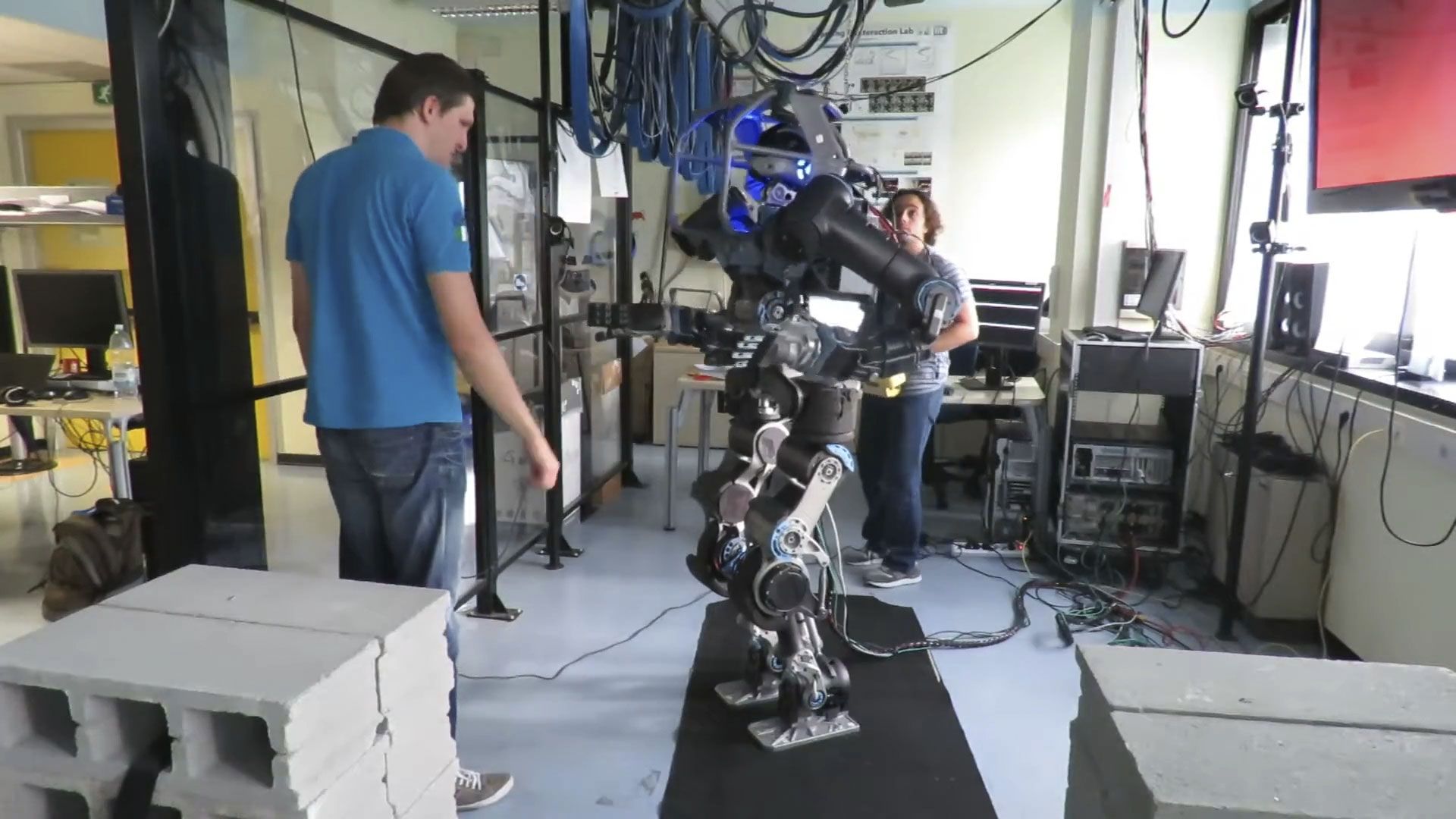
Exploiting The Redundancy For Humanoid Robots To Dynamically Step Over A Large Obstacle
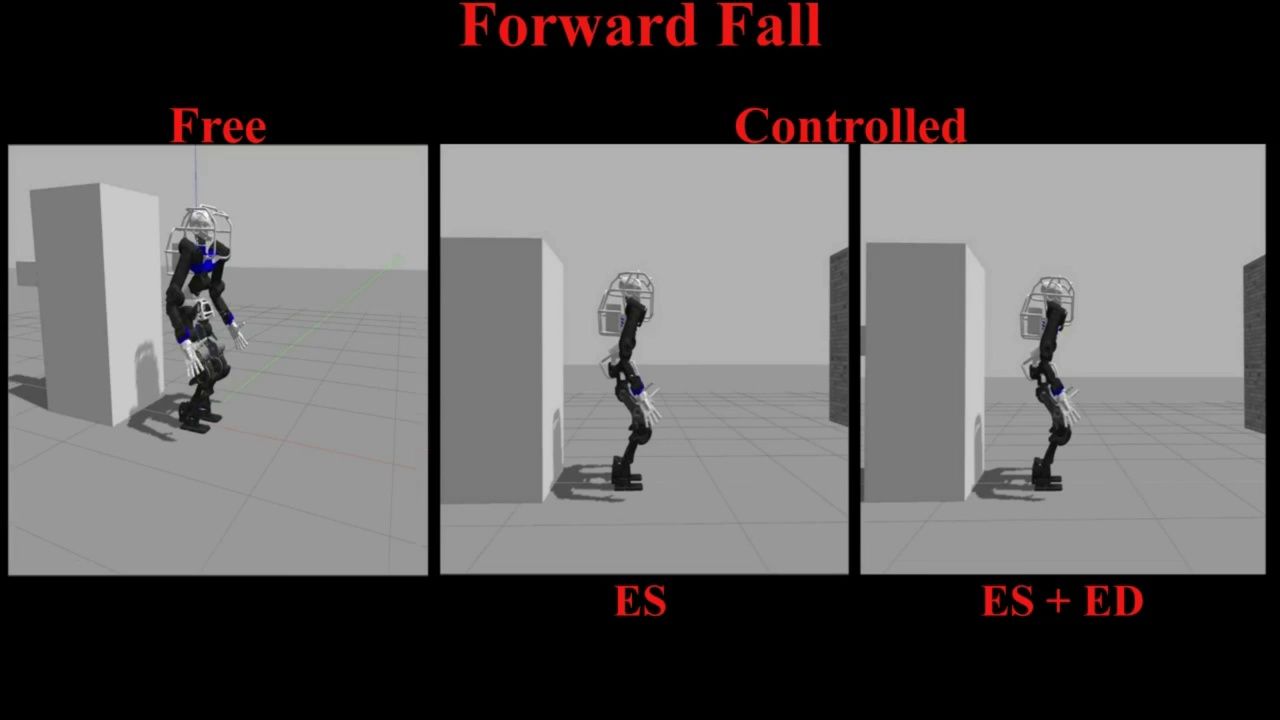
Fall Prediction Of Humanoids

Humanoid Running Based On Centroidal Dynamics And Heuristic Foot Placement

Humanoids 2016

Humanoids 2016
Humanoids 2017
ICRA 2018
Attitude Controller Experiments

IIT Robot WALKMAN Ready For The DARPA Robotics Challenge 2015
IJHR 2017
Inverse Dynamics Different Demonstrations
IROS 2017
IROS 2017
IROS 2015

OpenSoT
Optically Regulated Impedance Based Balancing For Humanoid Robots COMAN
IROS 2016
Ram 2018
Self Collision Avoidance constraint during Tele-Operation
Stabilization Of Bipedal Walking Based On Compliance Control
Validation Of Whole Body Loco Manipulation Affordances For Pushability And Liftability

WALK MAN Humanoid Robot
WALK MAN Project Review
WALK MAN Robot Using Handle Detection To Grasp A Novel Object

Walkman Humanoid Robot