The scope of the WALK-MAN project is to extend the capabilities of current humanoid robots towards a “working” humanoid demonstrator capable of responding to the expectations of the public for robots to be of real help in need. To achieve this target the project will advance the state of the art in humanoid locomotion and manipulation performance through RTD activities in several scientific aspects including whole-body locomotion and manipulation, environment perception and locomotion affordances, and soft robotic hardware development. All these RTDs activities will involve practical, collaborative experimentation, progress assessment and eventual dissemination. The skills and technology required to underpin these RTDs activities include different domain expertise ranging from systems engineering and control, to mechatronics, software competences as well coordination and system integration skills. In defining the project work plan, the challenge is therefore to select a work plan strategy and define the associated work packages, which can address the scientific and technical objectives of WALK-MAN. Each WP was defined to drive the technical and scientific innovation in one and well defined topic assigned to the main focus/expertise of one of the partners who is the leader/coordinator of the WP activities. Other partners will also contribute to accelerate the developments with complementary/alternative approaches and studies permitting the sharing of knowledge and information and exchange of expertise among the consortium while at the same time reducing the risk of failing to achieve the WPs’ objectives.
Following the main objectives listed in Sec. 1.1, the project work is spread over four years and is broken down into eight work packages (WP) with a stream from hardware design through the development of the core scientific aspects (locomotion, manipulation, environment perception and affordances) to final real-world assessment and evaluation of the humanoid demonstrator and eventual dissemination and exploitation, Fig 1.26. The RTD work can be encompassed in three activities:
- Soft robotics development and tuning (WP2),
- Motion and perception (WP3, WP4, WP5, WP6),
- Integration and validation (WP7).
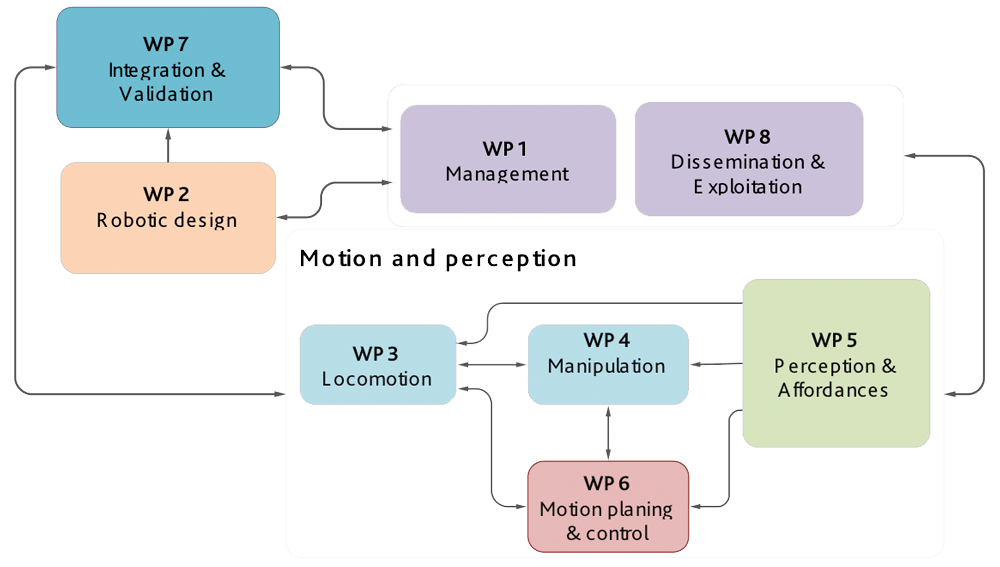
WALK-MAN work plan structure and the associated work packages
The first RTD activity includes the work in WP2 which is devoted to the development of the humanoid platform merging humanoid body-ware technologies evolved within Europe during the past years, particularly combining soft robotics technologies with optimal body design and embodied intelligence (mass/inertia distribution, elasticity tuning, etc.) and a range of perception elements including proprioceptive and exteroceptive sensing capabilities. Hardware activities on the design of new robust hands are also a core aspect of the work in WP2.
The motion and perception group of activities is divided into four respective work packages focusing in four scientific aspects. WP3 focuses on the locomotion aspects and methodologies related to leg gait pattern generation, reactive gait modulation, and whole-body locomotion and balancing with the latest methodologies merging reflexes with feed forward control for legs but also making extensive use of hand/arm actions and environment interaction.
WP4 isresponsible for the analysis of theoretical aspects of whole-body loco-manipulation, including robust bi-manual manipulation and body posture modulation, exploiting whole-body motion redundancy for generating the forces and impedance levels required to perform powerful manipulation. WP4 will provide insights to the control carried out in WP6, and the design of new loco-manipulation systems (limbs, feet, hands) developed in WP2.
WP5 objective is to develop the technologies related to perception particularly to the environment monitoring and reconstruction including the extraction of features, object recognition and classification tasks as well the extraction/learning of environments affordances related to whole-body locomotion and manipulation. WP6 is dedicated to motion planning and control. It will generate the whole body motions by blending the outcomes of WP3 (locomotion), W4 (manipulation), and modulating them using the outcome of WP5 (whole-body affordances). WP7 focus on the integration of all enabling developments in WP3, WP4, WP5, and WP6 into a working functional humanoid platform demonstrator. Moreover a further aim of WP7 is the definition of the assessment scenarios and the experimental validation. The latest include all the necessary experimentation and preparation to permit the participation in the DRC competition, the definition of a series whole-body loco-manipulation specific challenges and the definition of credible disaster response scenario for the second half of the project in collaboration with civil defence bodies.
The bidirectional flow as shown in the above figure effectively demonstrates the interaction among the associated WPs allowing the tuning of the work activities within each WP based on the outcome provided by the other WPs. All work packages will run in parallel and will last for the whole duration of the project, however the main focus in the first phase of the project will be on soft robotics development and tuning (WP2) and motion and perception activities (WP3, WP4, WP5, WP6) gradually focusing more as the project progresses to motion and perception (WP3, WP4, WP5, WP6) and integration and validation (WP7).